3D Point Cloud – Altes Hauptgebäude, TU Darmstadt
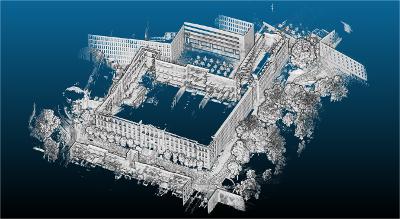
3D Point Cloud of the old main building at TU Darmstadt (S1|03, Hochschulstr. 1, 64289 Darmstadt, Germany). The raw data was captured with the Hector Tracker robot (http://www.teamhector.de/our-robot/51-hector-tracker) and processed using the Simultaneous Localization and Mapping approach developed by Kevin Daun based on Google Cartographer. The data set contains 186,896,629 points and the bounding box has a size of 220.2 m x 227.3 m 40.7 m.
Multi-Person Localization and Vital Sign Estimation Radar Dataset

This dataset provides the possibility to develop algorithms for, e.g., radar-based (through-wall) multi-person detection, localization, 3D direction-of-arrival estimation, breathing frequency estimation or heart beat estimation. The challenging dataset was collected using a semi-autonomous robot equipped with a commercially available through-wall radar system. It is composed of 62 scenarios of various difficulty levels with up to five persons captured in different postures, angles and ranges including wooden and stone obstacles that block the radar line of sight. Ground truth data for reference locations, respiration, electrocardiogram, and acceleration signals are included.
Manometer Validation Set
The validation set used in the paper Industrial Manometer Detection and Reading for Autonomous Inspection Robots presented at ECMR 2021. The dataset contains (augmented) images of manometers in the Team Hector lab with annotations for the manometer mask and its needle mask. If you use this data in your work, please cite the respective paper.

HuMoD Database
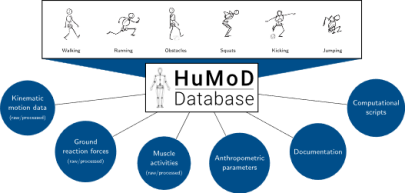
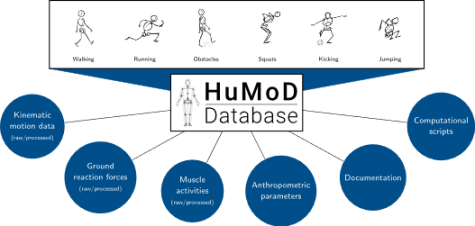
Human Motion Dynamics on Actuation Level
The HuMoD Database is a versatile and open database for the investigation, modeling and simulation of human motion dynamics with a focus on lower limbs. The database contains raw and processed biomechanical measurement data from a three-dimensional motion capture system, an instrumented treadmill and an electromyographical measurement system for eight different motion tasks performed by a representative female and male subject as well as anthropometric information for both subjects.