
Laufende Projekte mit Drittmittelförderung
Ansprechpartner: Prof. Dr. Oskar von Stryk
gefördert vom Bundesministerium für Forschung, Technologie und Raumfahrt im Rahmen des Programms DATIpilot
Ansprechpartner: M.Sc. Aljoscha Schmidt
Projekt gefördert vom Bundesministerium für Forschung, Technologie und Raumfahrt
Ansprechpartner: Dipl. Ing. Markus Kramer
Projekt gefördert durch das Land Hessen
Ansprechpartner: M.Sc. Jonathan Lichtenfeld
Projekt gefördert vom Bundesministerium für Bildung und Forschung;
Ansprechpartner: M.Sc. Vahid Firouzi
Projekt gefördert von der Deutschen Forschungsgemeinschaft (DFG);
Ansprechpartner: M.Sc. Stefan Fabian
Gefördert durch das Land Hessen,
Abgeschlossene Projekte
Ansprechpartner: M.Sc. Frederik Bark
Projekt gefördert vom Bundesministerium für Bildung und Forschung, Homepage
Ansprechpartner: Dr. Ing. Alexander Stumpf
Gefördert durch das Land Hessen
Ansprechpartner: Dr.-Ing. Jérôme Kirchhoff
Gefördert durch das Land Hessen, Homepage
Ansprechpartner: M.Sc. Martin Oehler
Gefördert durch die HOCHTIEF-Gesellschaft Nexplore Mehr erfahren
Ansprechpartner: M.Sc. Kevin Daun
Projekt gefördert vom Bundesministerium für Bildung und Forschung; Homepage DRZ e.V.
Ansprechpartner: Dr.-Ing. Stefan Kohlbrecher
Projekt gefördert vom Bundesministerium für Wirtschaft und Energie und dem Europäischen Sozialfonds
Ansprechpartner: M.Sc. Johannes Geisler
Projekt gefördert vom Bundesministerium für Wirtschaft und Energie und dem Europäischen Sozialfonds
Ansprechpartner: M.Sc. Alex Stumpf
Verbundprojekt gefördert von Europäischer Union und Bundeministerium für Bildung und Forschung
Ansprechpartner: Dr.-Ing. Jérôme Kirchhoff
Gefördert durch das Land Hessen
Ansprechpartner: Dr.-Ing. Janis Wojtusch
Gefördert durch das Land Hessen
Ansprechpartner: Dr.-Ing. Stefan Kohlbrecher
Gefördert durch das Land Hessen
Ansprechpartner: Prof. Dr. Oskar von Stryk
Gefördert von TOTAL
Ansprechpartner: Dipl.-Inform. Stefan Kohlbrecher, Prof. Dr. Oskar von Stryk
Gefördert durch DARPA Robotics Challenge, Track B
Ansprechpartner: M.Sc. Juan Manuel Delfa Victoria
Gefördert durch European Space Agency.
Ansprechpartner: Prof. Dr. Oskar von Stryk (Sprecher)
Dipl. Inf. Stefan Kohlbrecher
M. Sc. Alexander Stumpf
Im interdisziplinären Graduiertenkolleg werden grundlegende wissenschaftliche Herausforderungen untersucht, die an Szenarien des Monitoring einer potenziell wenig strukturierten und sich dynamisch verändernden Umgebung durch drahtlos miteinander kommunizierende, heterogene, stationäre und mobile Sensor- und Robotersysteme ausgerichtet sind.
Exzellence Initiative Graduate School Computational Engineering
Ansprechpartner: Prof. Dr. Oskar von Stryk
Gefördert im Rahmen der Exzellenz-Initiative des Bundes und der Länder
Elastische, bionisch inspirierte, zweibeinige Roboter (BioBiped)
Ansprechpartner: Dr.-Ing. Katayon Radkhah, Dipl.-Inform. Dorian Scholz
Ansprechpartner: Dr.-Ing. Janis Wojtusch
Menschen mit Oberschenkelamputation wünschen sich einen adäquaten Ersatz für ihr verlorenes Bein, der einen natürlichen Gang erlaubt und von ihnen als Körperteil angenommen wird. Einen vielversprechenden Ansatz hierfür liefern Prothesen, die den Gang aktiv durch Antriebe unterstützen. Im Rahmen dieses Projekts werden Grundlagentechnologien für die Konzeption und den Aufbau von nutzerfreundlichen, energieeffizienten, aktiven Beinprothesen erforscht.
Forschungszentrum Computational Engineering
Die computergestützte Modellierung, Simulation und Optimierung ermöglicht die Untersuchung komplexer, ingenieurwissenschaftlicher Systeme und Naturphänomene, bei denen der direkte Zugang durch Experimente zu aufwändig, zu teuer, zu gefährlich oder gar unmöglich ist.

Ansprechpartner: Dipl.-Inform. Dorian Scholz
Unsere beiden RoboCup-Teams: Darmstadt Dribbling Dackels (DDD) dreimaliger Weltmeister mit dem GermanTeam in der Liga der vierbeinigen Roboter und Darmstadt Dribblers (DD) Weltmeister 2009 und 2010 in der Humanoid-Liga
Ansprechpartner: Dr.-Ing. Janis Wojtusch
Die Modellierung des zeitveränderlichen, dynamischen Verhaltens des menschlichen Bewegungsapparats führt auf ein hochdimensionales mechanisches Mehrkörpersystem, bestehend aus Teilmodellen für Skelett und Schwabelmassen, Muskeln und Sehnen als redundante Antriebe sowie Optimierungsmodellen zur Simulation der an einer Bewegung beteiligten Muskelgruppen.
Ansprechpartner: Dipl.-Ing. Thomas Lens
Verbundprojekt gefördert vom Bundesministerium für Bildung und Forschung.
Ansprechpartner: Dr.-Ing. Christian Reinl
Seit 2007 im Schwerpunktprogramm 1180 ProWeSP
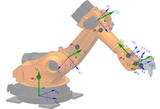
Zur präzisen, fräsenden Bearbeitung von Bauteilen sind Industrieroboterbislang aufgrund ihrer Nachgiebigkeit nur beschränkt einsatzfähig . Mit Hilfe eines mathematischen Modells können
Abdrängungseffekte simuliert und mit Hilfe von Optimierungsverfahren korrigiert werden.
Ansprechpartner: Dipl.-Inform. Martin Friedmann
Gefördert durch die Tracto-Technik GmbH & Co. KG, Lennestadt (2008/2009)

BioRob – Bionische Manipulatoren zur Erschließung neuer Anwendungen der Automatisierungstechnik
Ansprechpartner: Dipl.-Biol. Sebastian Klug, Dipl.-Ing. Thomas Lens
Verbundprojekt gefördert vom Bundesministerium für Bildung und Forschung in Kooperation mit Tetra GmbH (Ilmenau), Fraunhofer Institut für biomedizinische Technik IBMT (Sulzbach), Universität des Saarlandes (Saarbrücken), Seidel GmbH+Co.KG (Marburg), agricola GbR (Vechta-Langförden)
Ansprechpartner: Dipl.-Math. Christian Reinl, Dipl.-Inform. Max Risler
Seit Juli 2005 im Schwerpunktprogramm 1125 Kooperierende Teams mobiler Roboter in dynamischer Umgebung
Ansprechpartner: Dipl.-Math. Thomas Hemker
Funded by a medium-size company

Ansprechpartner: Dr. Thomas Hemker
Teilprojekt: Optimierungsmethoden für Simulationsmodelle
Im Rahmen dieses Projekts werden neue Methoden und Verfahren zur Optimierung von Systemen entwickelt, bei denen Systemeigenschaften meist von sehr rechenintensiven Simulationsmodellen beschrieben werden, und diese häufig nur als Black-Box in einen Optimierungsprozess eingebunden werden können.
Abgeschlossen seit September 2005
Gefördert von ISRA Vision Systems AG, Darmstadt

Abgeschlossen seit November 2004
Gefördert durch das BMBF im Rahmen des Bionik-Ideenwettbewerbs, in Kooperation mit der Universität des Saarlandes und GPS GmbH, Stuttgart
Projekt gefördert vom BMBF in Kooperation mit DaimlerChrysler, Untertürkheim, und TESIS DYNAware GmbH, München
Projekt STR 533/1-1 im DFG-Schwerpunktprogramm Analyse und Synthese kontinuierlich-diskreter technischer Systeme (KONDISK)
Projekt gefördert vom BMBF in Kooperation mit BMW AG, München, und TESIS DYNAware GmbH, München
Projekt im Sonderforschungsbereich 438, TU München
Projekt wurde gefördert vom BMBF in Kooperation mit BMW AG, München

Projekt im DFG-Schwerpunktprogramm Echtzeit-Optimierung großer Systeme
Projekt im FORTWIHR, Kooperationspartner TESIS DYNAware GmbH, München

Projekt im FORTWIHR Kooperationspartner BMW AG, München