
Ongoing Research Projects Supported by Third-Party Funds
Contact: Prof. Dr. Oskar von Stryk
Project supported by the Federal Ministry of Research, Technology and Space within the DATIpilot program,
Contact: M. Sc. Aljoscha Schmidt
Project supported by the Federal Ministry of Research, Technology and Space (BMFTR),
Contact: Dipl. Ing. Markus Kramer
Funded through State of Hessen
Contact: M.Sc. Jonathan Lichtenfeld
Project supported by the Federal Ministry of Research, Technology and Space (BMFTR),
Contact: M.Sc. Vahid Firouzi
Project supported by the German Research Foundation (DFG);
Contact: M.Sc. Stefan Fabian
Funded through State of Hesse
Completed Research Projects
Contact: M. Sc. Frederik Bark
Project supported by the Federal Ministry of Science and Education (BMBF), Homepage
Contact: Dr. Ing. Alexander Stumpf
Funded through State of Hessen
Contact: Dr.-Ing. Jérôme Kirchhoff
Funded through State of Hesse, Homepage
Contact: M.Sc. Martin Oehler
Funded by the HOCHTIEF company Nexplore
Contact: M.Sc. Kevin Daun
Project supported by the Federal Ministry of Science and Education (BMBF), Homepage DRZ e.V.
Contact: Dr.-Ing. Stefan Kohlbrecher
Funded Through Federal Ministry for Economy and Energy (BMWi) and European Social Fund
ContactM.Sc. Johannes Geisler
Funded Through Federal Ministry for Economy and Energy (BMWi) and European Social Fund
Contact: M.Sc. Alex Stumpf
Cooperative project funded by European Union and Federal Ministry of Education and Research
Contact: Dr.-Ing. Jérôme Kirchhoff
Funded through State of Hesse
Contact: Dr.-Ing. Janis Wojtusch
Funded through State of Hesse
Contact: Dr.-Ing. Stefan Kohlbrecher
Funded through State of Hesse
Contact: Prof. Dr. Oskar von Stryk
Funded through TOTAL
Contact: Dipl.-Inform. Stefan Kohlbrecher, Prof. Dr. Oskar von Stryk
Funded through DARPA Robotics Challenge, Track B
Contact: M.Sc. Juan Manuel Delfa Victoria
Funded by European Space Agency.
Contact:
Prof. Dr. Oskar von Stryk (Speaker)
Dipl. Inf. Stefan Kohlbrecher
M. Sc. Alexander Stumpf
The interdisciplineary research training group (Ph.D. program) investigates fundamental research topics arising from the scientific challenges involved in scenarios of monitoring a potentially weakly structured and dynamically changing environment by networks of heterogeneous, stationary and mobile sensor and robotic systems.
Exzellence Initiative Graduate School Computational Engineering
Contact: Prof. Dr. Oskar von Stryk
Funded by the excellence initiative of the German Federal and State Governments
Elastic, bionic inspired, two-legged robots (BioBiped)
Contact: Dr.-Ing. Katayon Radkhah, Dipl.-Inform. Dorian Scholz
Contact: Dr.-Ing. Janis Wojtusch
Transfemoral amputees want an adequate replacement for the missing limbs, which enables a natural gait and can be integrated into the user's body image. A promising approach to comply with these requirements is the application of prosthetic devices with integrated actuators to support the user's motion sequences. In this project, enabling technologies for the design and implementation of user-friendly, energy-efficient, active leg prostheses are researched.
Research Center Computational Engineering
The computer aided modeling, simulation and optimization enables the investigation of complex, engineering systems and natural phenomena which would be too expensive, too dangerous or even impossible to study by direct experimentation.

Contact: Dipl.-Inform. Dorian Scholz
Our two RoboCup teams and multiple times world champions:The four-legged robot team Darmstadt Dribbling Dackels (DDD) and the humanoid robot team Darmstadt Dribblers (DD)
Contact: Dr.-Ing. Janis Wojtusch
The modeling of the time dependent, dynamic behavior of the human musculoskeletal system results in a large scale mechanical multibody system. This consists of submodels for the skeleton, wobbling masses, muscles and tendons as redundant actuators. Optimization models are required for the simulation of the muscle groups involved in a motion.
Contact: Dipl.-Ing. Thomas Lens
Cooperative project funded by Bundesministerium für Bildung und Forschung
Contact: Dr.-Ing. Christian Reinl
since 2007 within the focal research program 1180 ProWeSP (Uni Hannover)
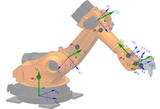
For precise milling application of work pieces industrial robots are applicable limitedly due to their elastic resilience. Now, Deviations are simulated and corrected by optimization methods considering a mathematical model, that reproduces static and dynamic interactions of robot and milling process.
Contact: Dipl.-Inform. Martin Friedmann
Funded by Tracto-Technik GmbH & Co. KG, Lennestadt (2008/2009)

BioRob – Bionic robot manipulators for opening up new applications for automation technology
Contact: Dipl.-Biol. Sebastian Klug, Dipl.-Ing. Thomas Lens
Cooperative project funded by the Federal Ministry of Education and Research (BMBF) in cooperation with TETRA GmbH, Ilmenau, Fraunhofer Institute for Biomedical Engineering (IBMT), Sulzbach, Universität des Saarlandes, Saarbrücken, Seidel GmbH+Co.KG, Marburg, agricola GbR, Vechta-Langförden
Project Homepage
Contact: Dipl.-Math. Christian Reinl, Dipl.-Inform. Max Risler
(since 07/2005) within the focal research program 1125 Cooperating teams of mobile robots in dynamic environments
Contact: Dipl.-Inform. Martin Friedmann
Funded by Tracto-Technik GmbH & Co. KG, Lennestadt (2008/2009)

Contact: Dr. Thomas Hemker
Subproject: Optimization methods for simulation models
In this project, new methods and procedures for the optimization of systems are developed, where system properties are usually described by very computationally intensive simulation models, and these can often only be integrated into an optimization process as a black box.
Completed since September 2005
funded by ISRA Vision Systems AG, Darmstadt

Completed since November 2004
Project supported by BMBF in cooperation with the University of Saarbrücken and GPS GmbH, Stuttgart
Project supported by BMBF in cooperation with DaimlerChrysler, Untertürkheim, and TESIS DYNAware GmbH, München
Project STR 533/1-1 of the DFG Focal Research Program Analysis and Synthesis of Discrete-Continuous Systems (KONDISK)
Project supported by BMBF in cooperation with BMW AG, München, and TESIS DYNAware GmbH, München
Project of the Collaborative Research Center 438, TU München
Project supported by BMBF in cooperation with BMW AG, Muenchen

Project of the DFG Focal Research Program Online Optimization of Large Systems (in German)
Project of FORTWIHR, industrial partner TESIS DYNAware GmbH

Project of FORTWIHR, industrial partner BMW AG, München