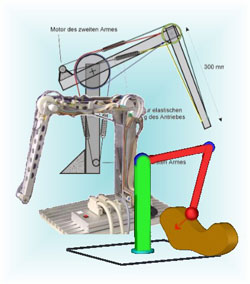
Der bionische Manipulator
Übertragung der Funktionsprinzipien eines biologischen Armmodells auf das ingenieurmässige Konzept eines “bionischen Roboters”
Überblick
Industrieroboter stehen in auffälligem Kontrast zu dem biologischen Bewegungsapparat. Ein wichtiger Unterschied in der Konstruktion besteht darin, dass Antriebe und Armglieder von Industrierobotern möglichst starr ausgelegt sind. Biologische Bewegungssysteme hingegen zeichnen sich gerade durch ihre Elastizität im Antrieb aus.
Auf der Basis des von Prof. Möhl an der Universität des Saarlandes entwickelten zweigelenkigen Labormodells wurde ein Mehrkörperdynamiksimula- tionsmodell entwickelt, mit dessen Hilfe eine systematische Auslegung des Roboters für industrielle Anwendungen möglich ist.
Mit dem bionischen Antriebsprinzip besteht die Chance, neue Bereiche für Automatisierungstechnik zu erschließen, wobei eine deutlich höhere Energieeffizienz und passive Sicherheit beim Einsatz in der Umgebung des Menschen möglich ist.
Beschreibung
Industrieroboter stehen in auffälligem Kontrast zu dem biologischen Bewegungsapparat. Ein wichtiger Unterschied in der Konstruktion besteht darin, dass Antriebe und Armglieder von Industrierobotern möglichst starr ausgelegt sind. Biologische Bewegungssysteme hingegen zeichnen sich gerade durch ihre Elastizität im Antrieb aus. Obwohl die elastisch gekoppelten Antriebe einen erhöhten Regelungsaufwand erfordern um die Schwingungen zu dämpfen, ergeben sich wesentliche Vorteile aus der leichteren und biegeentlasteten Bauweise und der Gefahrenreduktion bei Kollisionen.
Im Hinblick auf konkrete industrielle Anwendungen werden die Funktionsweise und die systematische Auslegung eines nach biologisch inspirierten Prinzipien aufgebauten und angetriebenen Manipulators untersucht.
Hintergrund
Obwohl sich industrielle und biologische Manipulatoren sowohl im Aufbau als auch in ihrer Funktionsweise unterscheiden, stehen beide vor den gleichen Aufgaben. Es sollen Objekte manipuliert und schnell und präzise bewegt werden.

An Industrieroboter werden sehr hohe Anforderungen gestellt, was Präzision, Geschwindigkeit und Traglast angeht. Um diesen Ansprüchen gerecht zu werden, wird versucht die unter Belastungen auftretenden Verformungen durch möglichst starr ausgelegte Gelenkantriebe und durch versteifte, massenbehaftete Roboterglieder zu reduzieren. Aus diesem Konstruktionsprinzip resultiert ein sehr geringes Verhältnis von Traglast zu Eigengewicht, verglichen mit biologischen Systemen. Hinzu kommt, dass solche Roboter auf Grund des starren Antriebs sich auch bei Kollisionen unnachgiebig verhalten. Aus Sicherheitsgründen ist ein effizienter Einsatz deshalb auch nur in einer strikt vom Menschen abgeschotteten Arbeitsumgebung möglich.

Der menschliche Arm besteht zwar ebenfalls aus starren Gliedern, den Knochen, die durch mehrere elastische und redundante Antriebe pro Gelenk, den Muskeln, bewegt werden. Im Gegensatz zu den Armgliedern eines Roboters sind die Knochen jedoch spezielle auf die Belastung hin optimierte Leichtbaukonstruktionen. Verglichen mit technischen Konstruktionen haben biologische Manipulatoren ein bisher unerreichtes Verhältnis von Traglast zu Eigengewicht. Bei genauerer Betrachtung ist es die Elastizität, die die biologischen Manipulatoren besitzen, die den wesentlichen Unterschied ausmacht. Es ist bekannt, dass die elastischen Eigenschaften der Muskeln in Kombination mit einer angepassten neuronalen Kontrolle entscheidend sind für schnelle, präzise Bewegungen.
Förderung
Dieses Projekt wurde durch das BMBF im Rahmen des Bionik-Ideenwettbewerbs von 1.6.-30.11.2004 gefördert.