Optimale kooperative Steuerung von Mehrrobotersystemen
Zielorientierte Modellierung und Optimierung dynamischer Aktionszuweisungen und physikalisch-basierten Bewegungsverhaltens kooperierender mobiler Roboter mit hybriden dynamischen Systemen
Überblick
Zur Ermittlung optimaler Teamstrategien müssen die individuellen, physikalischen Bewegungsmöglichkeiten jedes einzelnen Roboters berücksichtigt werden. Die direkte eins-zu-eins übertragung von taktischen Spielzeugen menschlicher Fußballsspiele auf autonome Fußballroboter ohne Berücksichtigung senso-motorischer Eigenschaften ist nicht optimal.
Auf der Grundlage nichtlinearer hybrider dynamischer Zustandsautomaten wird eine neue Methode zur optimalen Koordination und Steuerung von Mehrrobotersystemen untersucht, welche optimale Strategien über die numerische Lösung von gemischt ganzzahligen, dynamischen Optimierungsproblemen bestimmt.
Beschreibung
Im Rahmen des Schwerpunktprogramms wird auf der Grundlage nichtlinearer hybrider dynamischer Systemtheorie ein neues, allgemeines Paradigma zur zielorientierten dynamischen Koordination eines Teams mobiler Roboter untersucht, in das RoboCup-Szenario integriert und anhand dessen validiert werden.
Der zeitveränderliche hybride Zustand des Gesamtsystems besteht aus den diskreten (Rollen, Aktionen) und den kontinuierlichen (Position, Orientierung, Geschwindigkeit) Zustandsgrössen aller mobilen Roboter und Objekte, dessen zeitlicher Verlauf durch einen hybriden Zustandsautomaten beschrieben wird. Dies ermö¶glicht die enge und formale Verknüpfung von diskreter und kontinuierlicher Systemdynamik, d.h. von dynamischen Rollen- und Aktionszuweisungen bzw. Aktionsabfolgen und dem physikalischen Bewegungsverhalten der einzelnen Roboter.
Die Bestimmung optimaler hybrider Zustandsverläufe zur Minimierung eines Gütekriteriums für die optimale Mehrroboterkooperation unter Einhaltung zusätzlicher Beschränkungen wird auf gemischt ganzzahlige Optimierungsprobleme transformiert, die numerisch gelöst werden. Im Rahmen des Schwerpunktprogramms wird damit die innovative Integration physikalisch-basierter Trajektorienplanung mit dynamischen Aktionszuweisungen in Softwarearchitekturen für Robotersteuerungen ebenso wie in integrierte Entwurfsverfahren befördert. Die hier entwickelten Methoden und Techniken sind grundsätzlich auf andere Szenarien kooperierender mobiler Roboter übertragbar, bei denen die physikalischen Bewegungseigenschaften einen entscheidenden Einfluss besitzen.
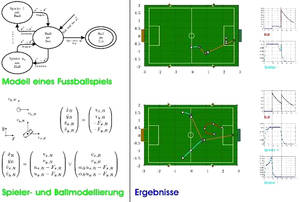
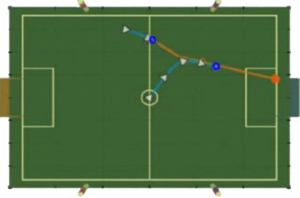
Modellierung einer Fussballspielsituation durch einen hybriden Automaten und Berechnung einer Strategie inklusive der individuellen Bewegungstrajektorien einzelner Roboter, so dass möglichst schnell ein Tor erzielt wird.
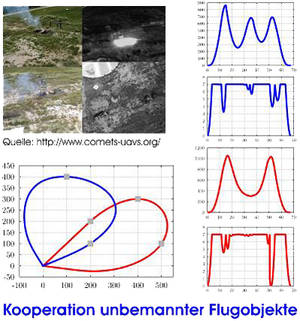
Ein weiteres Anwendungsbeispiel stellt die Kooperation unbemannter Flugobjekte dar. Zur Aufklärung (z.B. bei Waldbrandgefahr oder bei Katastrophen) sollen verschiedene Wegpunkte besucht werden. Diese werden auf kooperierende, unbemannte Flugobjekte verteilt, und für jedes der Flugzeuge wird eine spezifische Flugtrajektorie berechnet, so dass alle Wegpunkte in minimaler Zeit besucht werden können (siehe auch www.comets-uavs.org).
Förderung
Dieses Projekt wird durch die Deutsche Forschungsgemeinschaft im Rahmen des Schwerpunktprogramms 1125 Kooperierende Teams mobiler Roboter in dynamischer Umgebung seit Juli 2005 bis Juni 2007 gefördert (Kennzeichen STR 533/4-1).