TurtleBot3
Autonome mobile Roboter haben großes Potenzial den Menschen in verschiedenen Bereichen zu unterstützen. Die Entwicklung dieser komplexen Systeme erfordert dabei jedoch ein hohes Maß an Erfahrung in vielen Bereichen der Robotik. Zudem ist der Unterschied zwischen den theoretischen Ansätzen und der praktischen bzw. robusten Umsetzung meist groß, was kontextspezifische Herausforderungen mit sich bringt. Um den ersten Kontakt mit autonomen Robotern zu erleichtern und einen umfassenden Einstieg in die Robotik zu ermöglichen, haben wir eine mobile Plattform auf Basis des TurtleBot3 entwickelt. Dieser spezielle Kleinroboter ermöglicht es den Studierenden, Algorithmen in verschiedenen Bereichen, wie z.B. Kinematik, Steuerung, Objekterkennung, Navigation und Verhalten, zu entwickeln. Als ergänzendes Angebot können die von den Studierenden in der Vorlesung erarbeiteten Lösungen im Rahmen der TurtleBot-Challenge in Turnierform evaluiert werden.
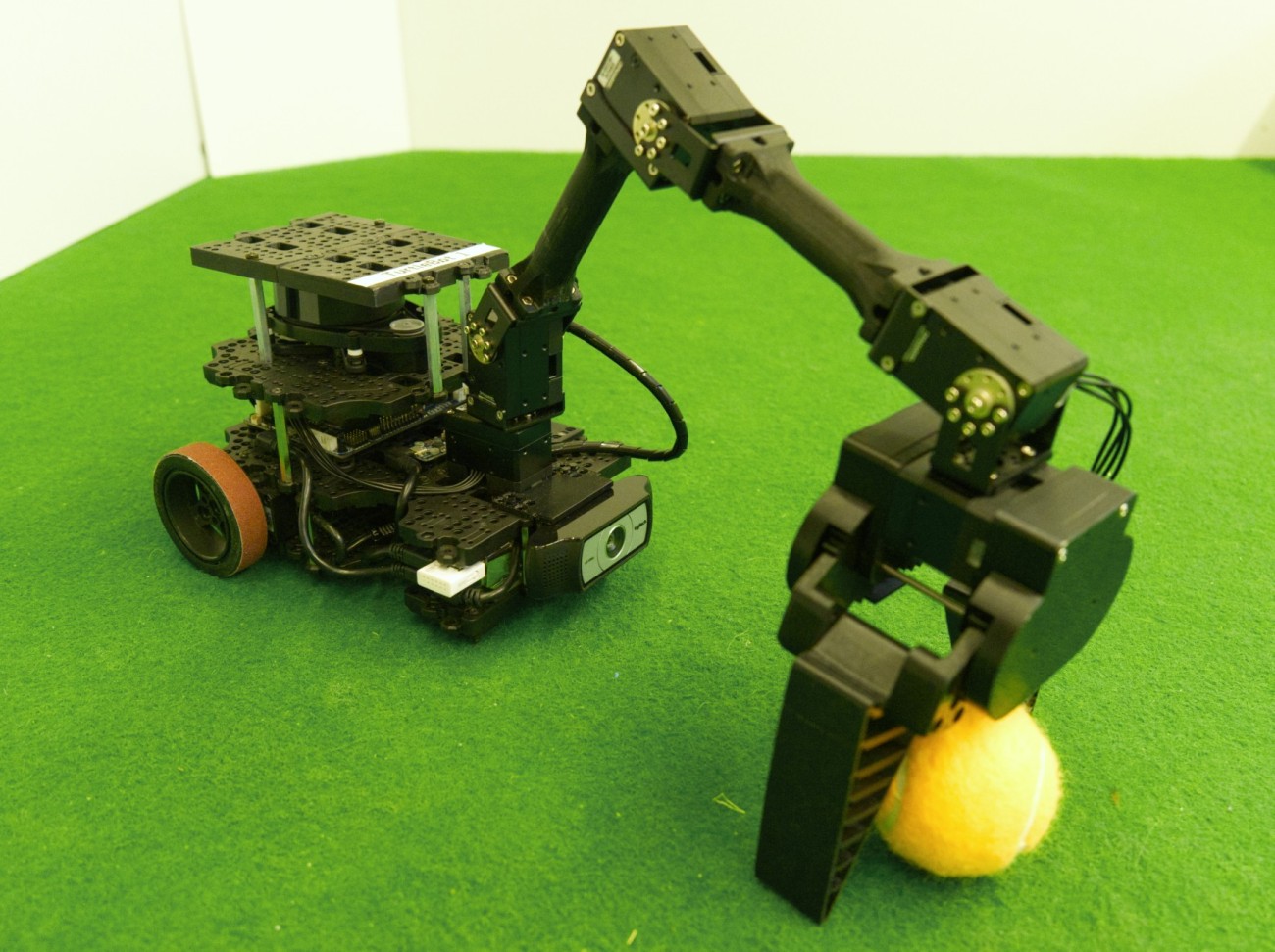
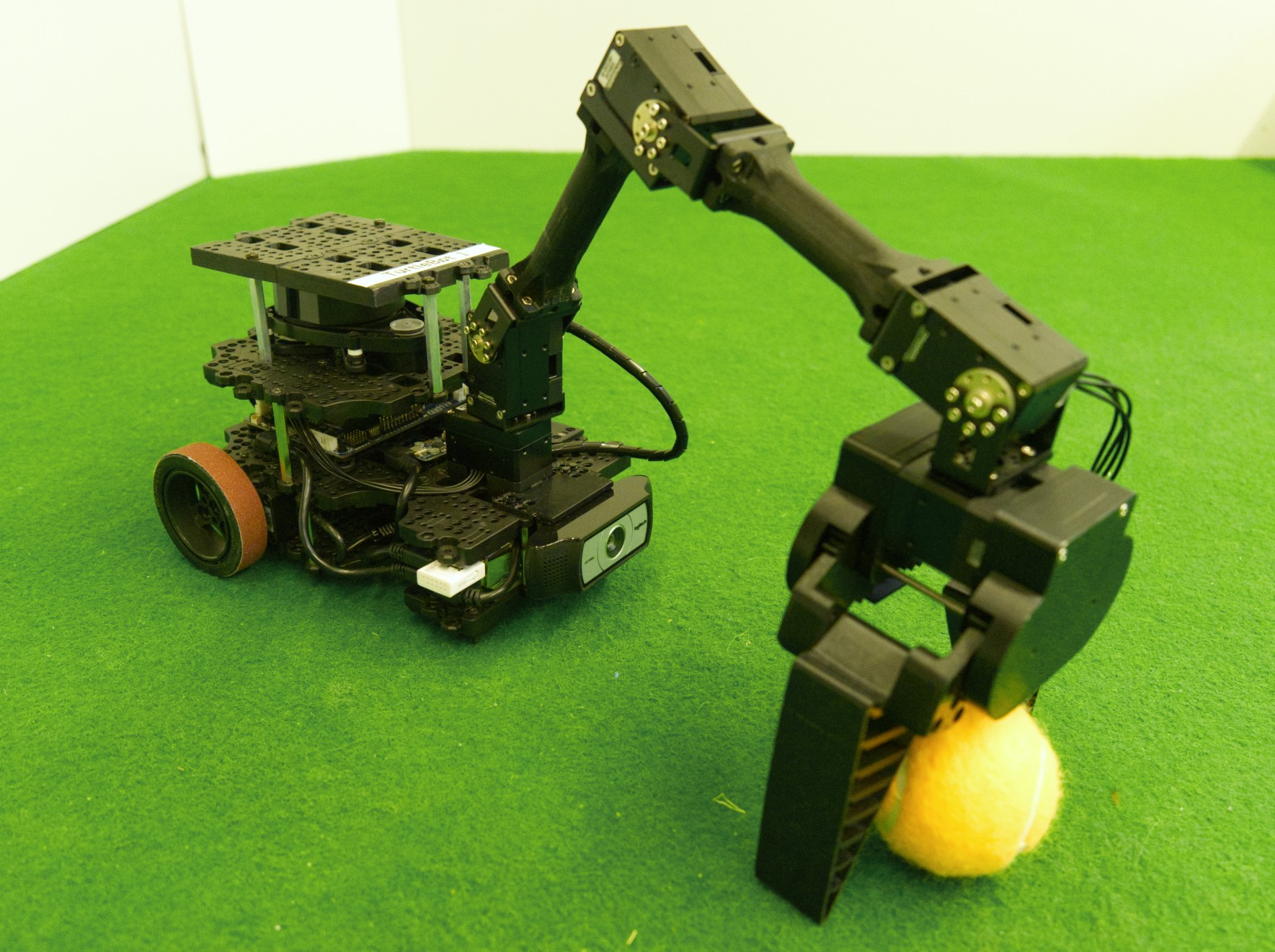
Die TurtleBots besitzen einen Differenzialantrieb und können mit Hilfe der Odometrie-Informationen bzw. ihren Lidar- und IMU-Sensor navigieren und sich lokalisieren. Die HD-Kamera ermöglicht die Wahrnehmung der Umgebung sowie die Erfassung von Hindernissen, die mit Hilfe des Arms mit vier Freiheitsgraden manipuliert werden können. Als Endeffektor verfügt der Arm über einen Fin-Ray-Greifer, der sich an die Form verschiedener Objekte anpassen kann.
- Gewicht: 2 kg
- Größe: 24 cm x 18 cm x 16 cm (ohne Arm)
- Reichweite: ~25 cm
- Fortbewegung: Differentialantrieb, ~ 0.22 m/s max.
- Freiheitsgrade: 6
- Sensoren: Laser-Abstandssensor 360 LDS-01, IMU, RGB-Kamera (RGB-D-Kamera in der ersten Version)