TurtleBot3
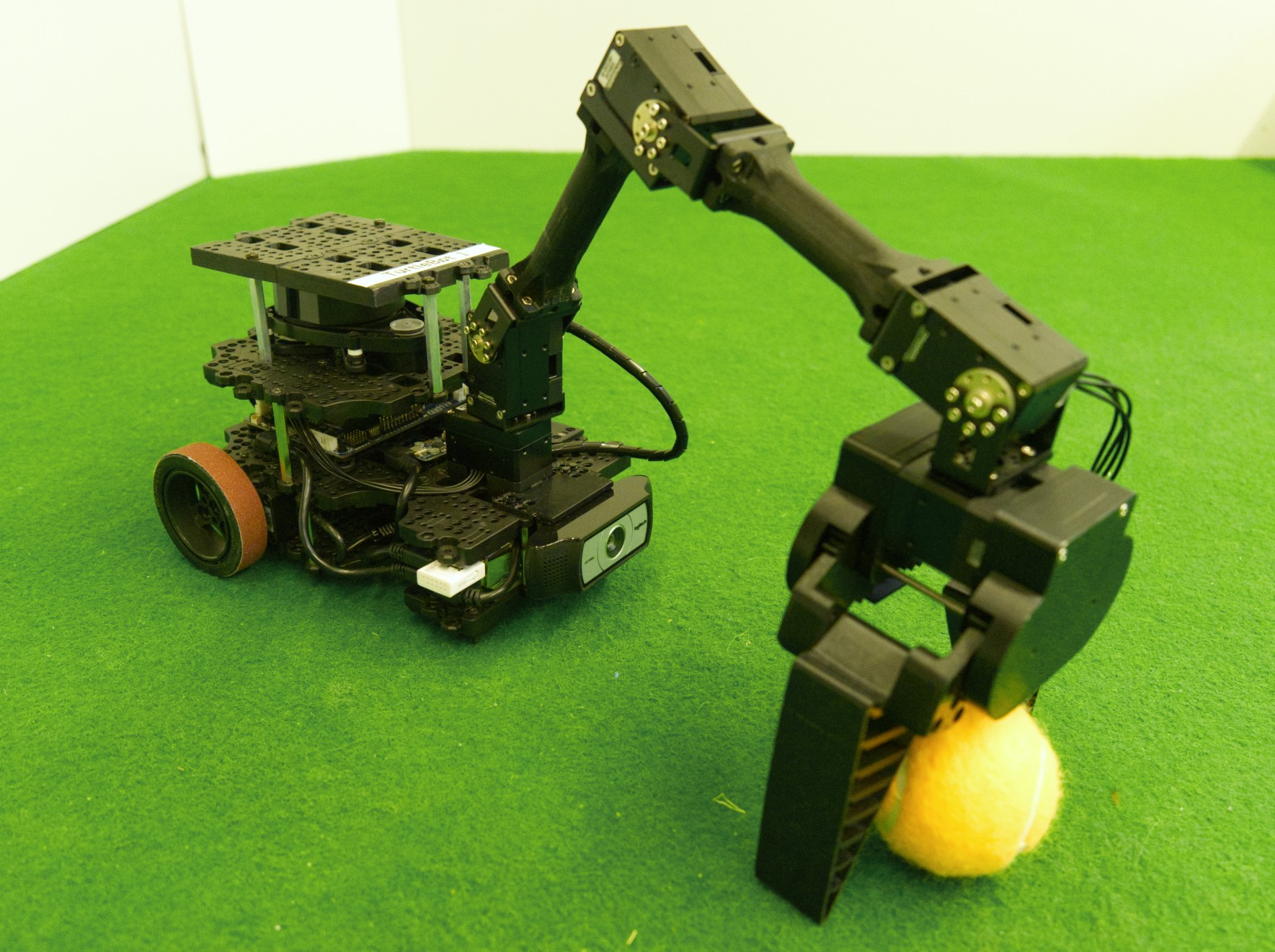
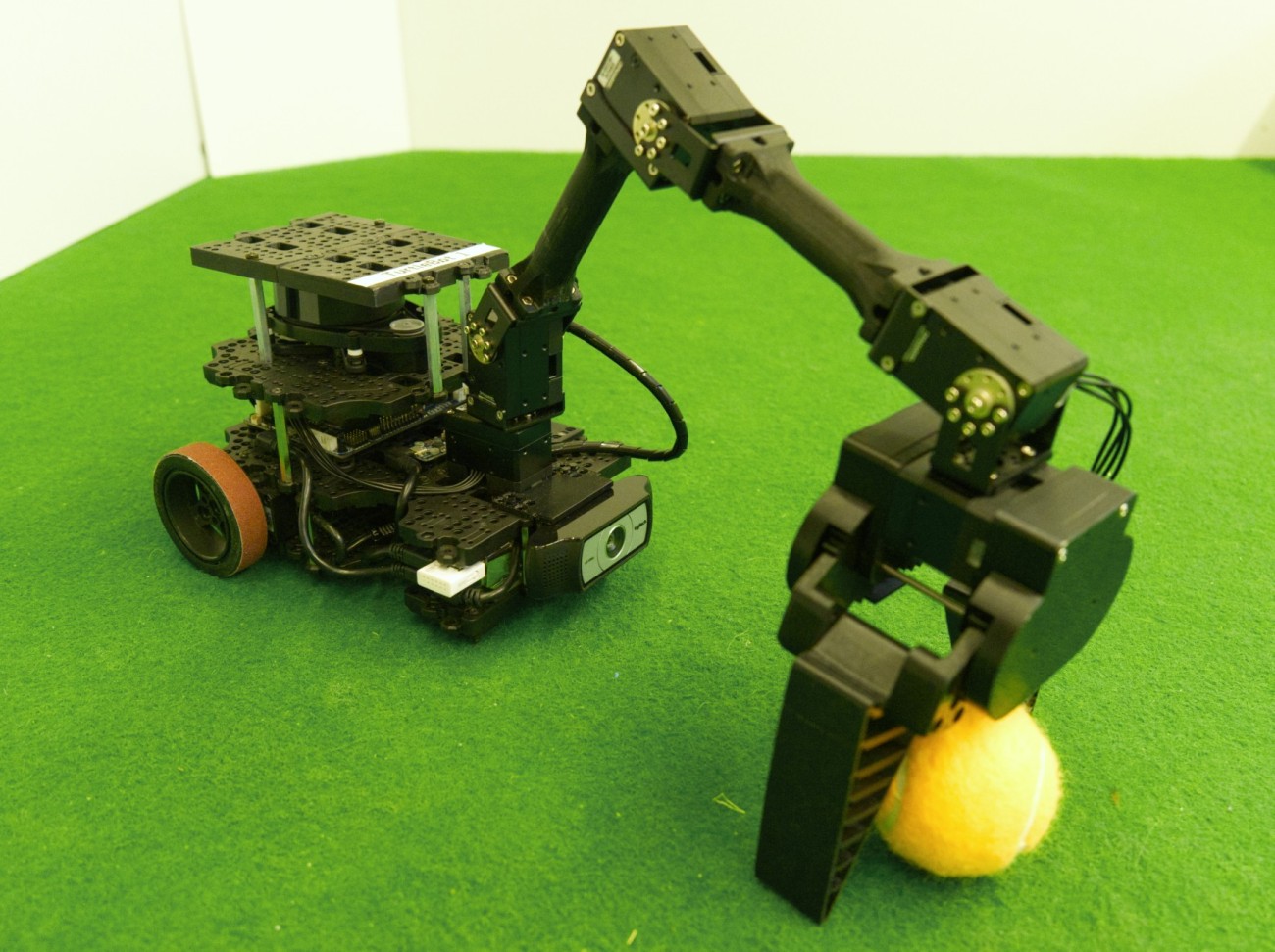
Autonomous mobile robots have a great potential to support humans in various areas. Nevertheless, the development of these complex systems requires a high amount of experience in many robotic fields. Further, the gap between theoretical algorithms and practical and robust usability is usually large and brings special context-specific challenges. To facilitate the first contact with these robots and to enable a comprehensive start in robotics, we developed a mobile platform based on the TurtleBot3. This special small-size robot enables the students to develop algorithms in different fields, e.g., kinematics, control, object detection, navigation, and behavior. As an additional offer, the created solutions during the lecture can be competitively compared among the students during the TurtleBot-Challenge.
The TurtleBots are driven by a differential drive and can navigate and localize using their lidar and IMU sensor in addition to the odometry information. The HD camera enables to sense the environment as well as obstacles that can be manipulated using their four degrees of freedom arm. As an end-effector, the arm has a Fin Ray gripper that facilitates the gripping of various objects.
- Weight: 2 kg
- Size: 24 cm x 18 cm x 16 cm (w/o arm)
- Reach: ~25 cm
- Locomotion: Differential drive, ~ 0.22 m/s max.
- Degrees of freedom: 6
- Sensors: Laser distance sensor 360 LDS-01, IMU, RGB camera (RGB-D camera in the first version)