Darmstädter Rettungsroboter international an der Spitze
Darmstädter Rettungsroboter gewinnen mit bester autonomer Strahlungskartierung eines Atomkraftwerks
26.06.2023
Das Rettungsrobotik-Team Hector vom Fachgebiet Simulation, Systemoptimierung und Robotik der TU Darmstadt belegte bei dem internationalen Robotikwettbewerb EnRicH den ersten Platz in der Kategorie Strahlungskartierung und hat damit bei allen vier Durchführungen dieses zweijährlichen Wettbewerbs regelmäßig einen ersten Platz erzielt.
-
![]()
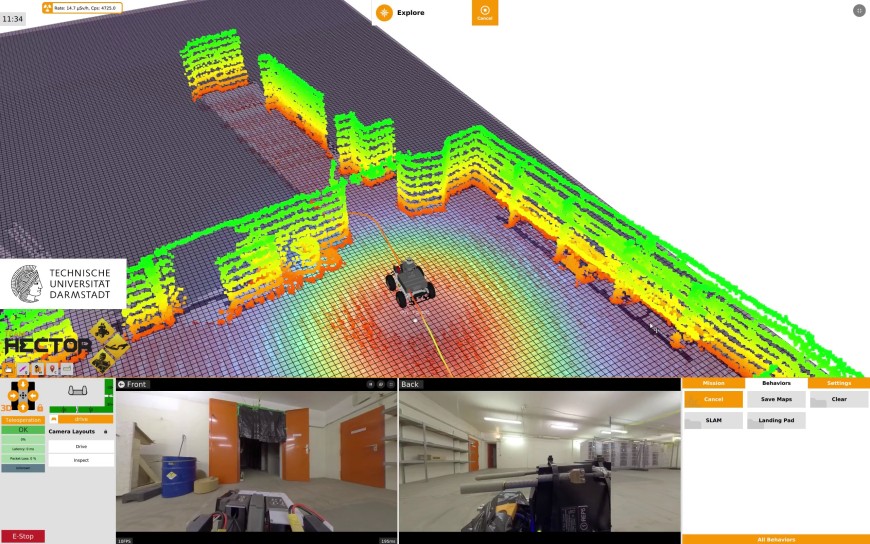
Bedieneransicht während Scout autonom das Kraftwerk erkundet und gleichzeitig eine 3D und eine Strahlungskarte erstellt. -
![]()
EnRicH 2023 fand zum 4. Mal im AKW Zwentendorf statt. -
![]()
Scout während der Erkundung. -
![]()
Bedieneransicht während Scout autonom das Kraftwerk erkundet und gleichzeitig eine 3D und eine Strahlungskarte erstellt. -
![]()
Team Hector gewinnt den Preis für die beste Strahlungskartierung -
![]()
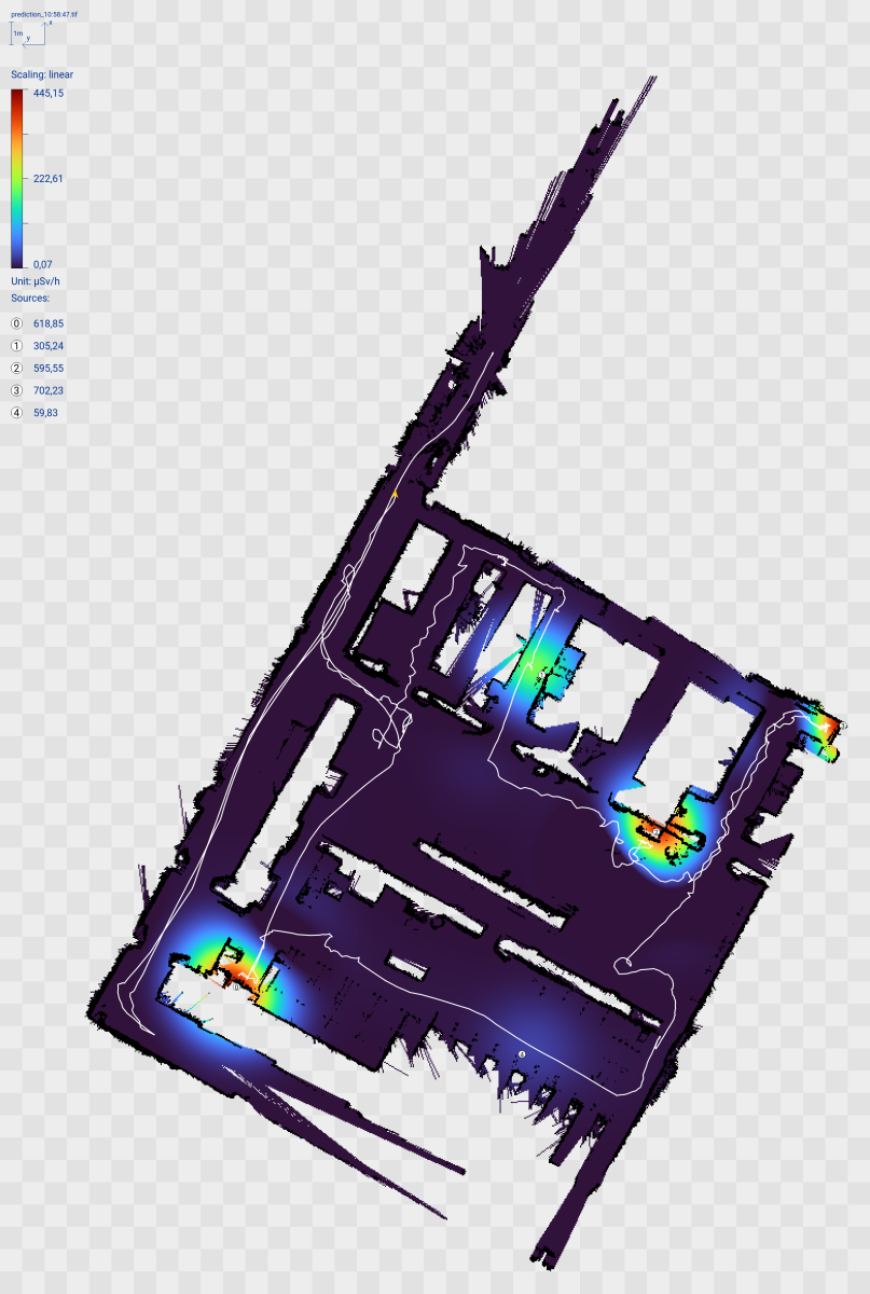
Die vom Roboter erstellte 2D Strahlungskarte mit Lokalisierung der Quellen. -
![]()
Die intelligenten Rettungsroboter TIM und Scout -
![]()
-
![]()
Team Hector bei der Teambesprechung -
![]()
TIM während der Erkundung -
![]()
TIM hat den vermissten Arbeiter gefunden -
![]()
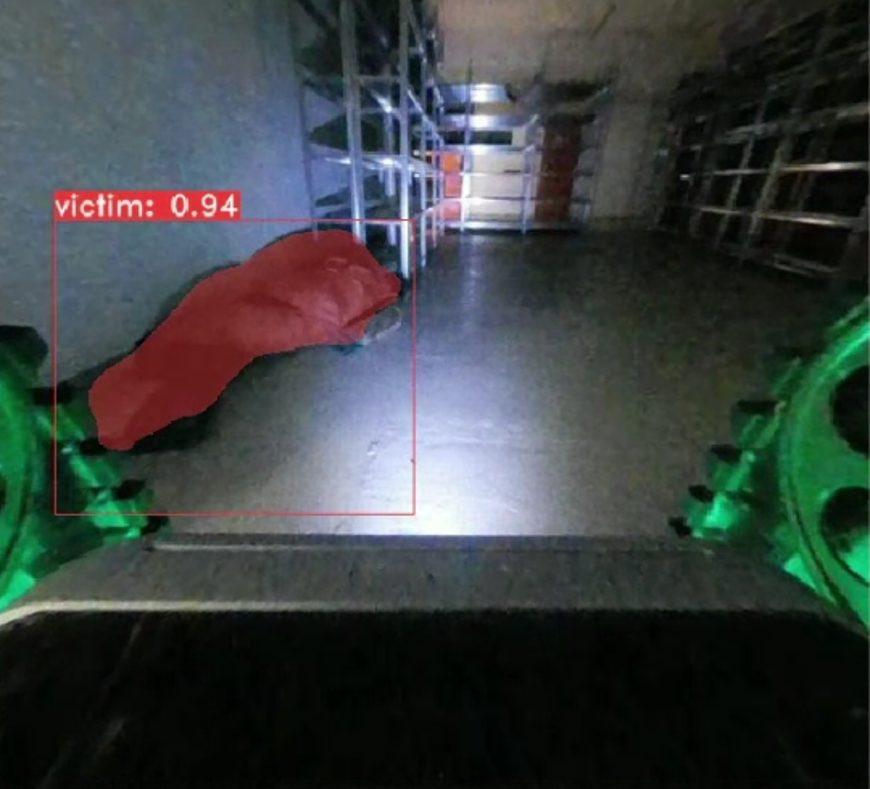
KI Assistenz zur autonomen Erkennung des vermissten Arbeiters









- Gehe zu Bild 1
- Gehe zu Bild 2
- Gehe zu Bild 3
- Gehe zu Bild 4
- Gehe zu Bild 5
- Gehe zu Bild 6
- Gehe zu Bild 7
- Gehe zu Bild 8
- Gehe zu Bild 9
- Gehe zu Bild 10
- Gehe zu Bild 11
- Gehe zu Bild 12
Der europäische Robotikwettbewerb EnRicH wurde vom 12. bis zum 16. Juni 2023 zum vierten Mal im Kernkraftwerk Zwentendorf in Österreich ausgerichtet. Ziel des Wettbewerbs ist es, die Einsatzfähigkeit von Rettungsrobotern bei einem nuklearen Ernstfall zu testen. Das Kraftwerk wurde fertiggestellt, jedoch nie in Betrieb genommenen. Dadurch bietet es eine ideale Umgebung, um den Einsatz von Rettungsrobotern bei einem Strahlungsunfall unter realistischen Bedingungen zu testen. Hierzu wurde im Erdgeschoss des Kraftwerks ein Unfallszenario mit einem vermissten Arbeiter und mehreren aktiven Strahlungsquellen nachgestellt.
Aufgabe der mobilen Roboter war es, möglichst autonom eine präzise dreidimensionale Karte der Gebäudegeometrie und eine Karte der Strahlungsintensität in dieser Umgebung zu erstellen, sowie die Strahlungsquellen exakt zu lokalisieren. Des Weiteren sollten basierend auf Strahlungsmessungen verschiedene Manipulationsaufgaben durchgeführt werden, z.B. Ventile geschlossen oder Knöpfe betätigt, sowie ein vermisster Arbeiter gesucht und in einen sicheren Bereich transportiert werden.
Während beim vorangegangenen Wettbewerb vor zwei Jahren in einem relativ großräumigen Bereich mit wenigen Hindernissen und guter Funkabdeckung operiert wurde, war die Umgebung dieses Mal deutlich herausfordernder: enge Gänge mit verschiedensten Hindernissen, ein drei Meter tiefes Loch das die Roboter vermeiden mussten, große Gebiete mit nur schlechter oder ganz ohne Funkverbindung, teils vollständige Dunkelheit. Damit wurden die Anforderungen an die Robustheit der Autonomie, Perzeption und Navigation der Roboter deutlich erhöht.
Team Hector trat dieses Jahr erneut in einer Kooperation mit dem Deutschen Zentrum für Rettungsrobotik e.V. an, in welchem die TU Darmstadt selbst Gründungsmitglied ist. Eingesetzt wurden zwei kooperierende Bodenroboter. Zum einen TIM, ein mobiler Bodenroboter mit variablem Kettenantrieb und präzisem Manipulatorarm, der dem Team im Rahmen des vom Bundesministerium für Bildung und Forschung (BMBF) geförderten Verbundforschungsprojekts zur Etablierung des Deutschen Rettungsrobotik-Zentrums (DRZ) zur Verfügung steht. Im Rahmen des vom Fachgebiet koordinierten Verbundprojekt KIARA wird mit dem Roboter die Unterstützung polizeilicher Einsatzkräfte in akuten lokalen Gefahrenlagen untersucht. Zum anderen emergenCITY Scout, ein mobiler radgetriebener Bodenroboter zur zügigen Exploration von Stadtgebieten in Krisenszenarien, der im Rahmen des LOEWE-Zentrums emergenCITY entwickelt wurde.
Mobile künstliche Intelligenz für Katastrophenszenarien
Da die manuelle Steuerung von Rettungsrobotern in komplexen Katastrophenumgebungen anspruchsvoll und fehleranfällig ist, forscht das Team an der Entwicklung intelligenter Assistenzfunktionen zur Unterstützung der Bediener. Damit sollen in Zukunft Einsätze effektiver und sicherer gemacht werden.
Beide Roboter sind mit an der TU Darmstadt entwickelten Autonomie-Funktionsmodulen ausgestattet. Die auf den Modulen installierten Sensoren werden verwendet, um mit neuen Algorithmen Assistenzfunktionen, wie autonome Erkundung oder Anfahrt eines vorgegebenen Wegpunktes, zu ermöglichen. So wurden komplexe Algorithmen entwickelt, um die Daten von Lidar, Inertialmesssystem und 360°-Kamera zu fusionieren und in Echtzeit die Position des Roboters zu berechnen und ein genaues dreidimensionales Modell der Umgebung zu generieren. Kamera-Daten werden direkt auf dem Roboter semantisch analysiert, um den vermissten Arbeiter zu lokalisieren. Die Hinzunahme eines Dosimeters ermöglicht das Erstellen einer Strahlungskarte und die Lokalisierung der Quellen.
Aus dem 3D Modell wird ermittelt, welche Bereiche sicher befahrbar sind und welche Bereiche noch unbekannt sind. Damit kann die Methode zur autonomen Erkundung sicher Pfade durch das Kraftwerk planen. In der manuellen Steuerung werden die Operatoren durch das in Echtzeit generierte 3D-Modell des Roboters und seiner Umgebung unterstützt, so können z.B. Kollisionen mit der Umgebung in engem Raum ebenso wie Löcher im Bode vermieden werden.
Die Module prüfen auch kontinuierlich die Qualität der Funkverbindung und sind mit Funktionen ausgestattet, die auch nach einem zu langen Verlust der Funkverbindung den Roboter wieder sicher zurück navigieren können. So kann sichergestellt werden, dass die Roboter nach Abbruch der Funkverbindung nicht verloren gehen.
Kooperativ zum Erfolg
Beim Wettbewerb konnten die beiden Roboter kooperativ, mit Hilfe der Autonomie- und Assistenzfunktionen, die Umgebung erfolgreich und effizient erkunden. So führte der schnelle und wendige Roboter Scout eine autonome Vorerkundung mit Groblokalisierung der Strahlungsquellen durch. Die Positionen wurden an den zweiten Roboter TIM weitergegeben, der die Positionen gezielt anfahren konnte und mit dem beweglichen Arm die Strahlungsquellen exakt verorten und die aufbauenden Manipulationsaufgaben durchführen konnte.
Alle Daten wurden während der Mission in Echtzeit auf dem Roboter verarbeitet und so konnten die Karten und Modelle direkt nach Missionsende abgegeben werden.
In einem Ernstfall könnten so von den Robotern erste Erkundungs- und Abwehrmaßnahmen zur Bewältigung der Katastrophe eingeleitet werden, für die Rettungskräfte sich sonst einem hohen Risiko aussetzen müssten. Die direkte Verfügbarkeit der Karten und Modelle ermöglicht ein detailliertes Lagebild und kann die weitere Einsatzplanung wertvoll unterstützen.
Hohe Qualität überzeugte
Letztendlich überzeugte die Jury die hohe Qualität und Genauigkeit der im Wettbewerb erstellten 2D- und 3D- Strahlungskarten, sodass Team Hector den ersten Platz in den Kategorien Strahlungskartierung erreichte.
Neben der Trophäe freut sich das Team über den erfolgreichen Wettbewerb und spannende Datensätze. Diese sollen gemeinsam mit den entwickelten Methoden zeitnah veröffentlicht werden, sodass auch andere Forschungsgruppen und Rettungsorganisationen von den Erkenntnissen profitieren.
