Weltbeste autonome Retter
Team Hector belegt mit zahlreichen Auszeichnungen Platz zwei bei der RoboCup-WM
2023/08/10
Das Rettungsrobotik-Team Hector der TU Darmstadt hat bei der diesjährigen RoboCup-Weltmeisterschaft in der Liga der Rettungsroboter die Auszeichungen für Best in Class Autonomy, Technology Challenge und Best Team Description Paper sowie in der Gesamtwertung den 2. Platz gewonnen.
-
![]()
Team Hector mit dem an der TU Darmstadt entwickelten Rettungroboter Asterix sowie Mitarbeitern des Deutschen Rettungsrobotik-Zentrums e.V. -
![]()
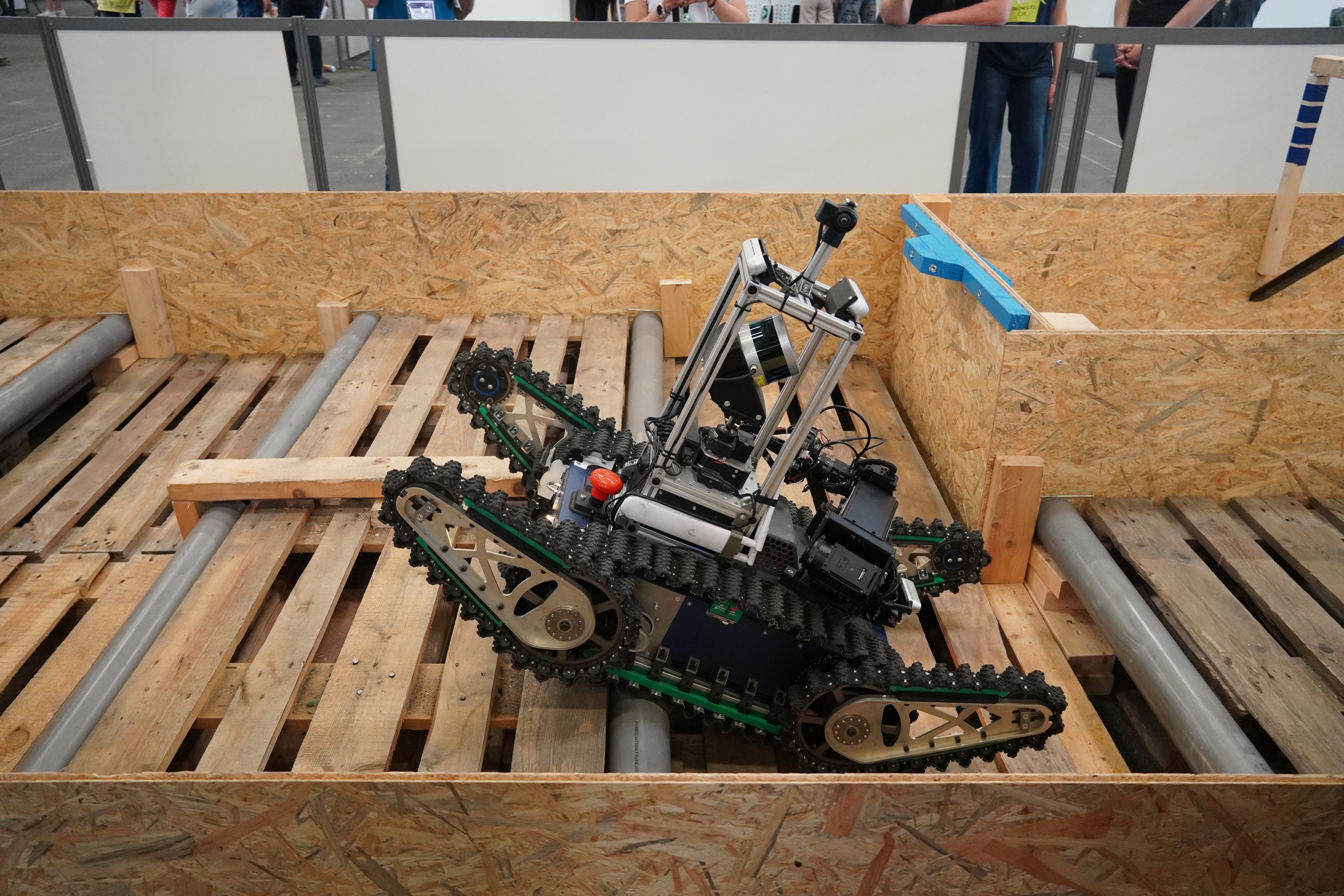
Im Finale mussten Not-Aus Schalter gedrückt werden

- Go to picture 1
- Go to picture 2
Dieses Jahr traten bei der in Bordeaux, Frankreich, vom 06.07. bis 10.07.2023 ausgetragenen RoboCup-Weltmeisterschaft für intelligente Rettungsrobotersysteme in der Rescue Robot League 14 Teams aus Europa sowie China, Japan, Mexiko, Südkorea, USA und Thailand mit ihren selbstentwickelten Robotersystemen gegeneinander an.
Während Roboter für industriellen Anwendungen für strukturierte Umgebungen und Umwelteinflüsse sowie sich wiederholende Missionen optimiert werden können, bestehen in der Rettungsrobotik besondere Herausforderungen darin, dass die missionsspezifischen Aufgaben zur Unterstützung der Einsatzkräfte bei jedem Einsatz neu und die Umgebungsbedingungen naturgemäß sehr stark variieren und durch Beschädigungen sehr unstrukturiert sein können.
Typische Anforderungen eines Rettungseinsatzes
In verschiedenen anspruchsvollen Arenen, die unterschiedlichen Einsatzanforderungen entsprechen, werden im Wettbewerb typische Anforderungen eines Rettungseinsatzes nachgestellt. Die Fähigkeiten der Roboter mussten in 20-minütigen Missionen demonstriert und evaluiert werden.
Die ersten 10 Minuten bestanden dabei aus Navigationsaufgaben wie dem Überqueren von Hindernissen und Treppen, dem Öffnen und Durchqueren von Türen oder der Kartographierung eines unbekannten Terrains.
In der zweiten Hälfte der Mission mussten Manipulations- und Inspektionsaufgaben durchgeführt werden, die in der Arena verteilt waren. Dafür mussten Bereiche wie Rohre inspiziert, Not-Aus-Knöpfe betätigt und unterschiedliche Hebel umgelegt werden.
Stärkerer Fokus auf Zuverlässigkeit
Im Vergleich zu vergangenen Wettbewerben wurde dieses Jahr ein stärkerer Fokus auf Zuverlässigkeit in Durchführung und Wiederholungen gelegt. Außerdem wurde der Punktemultiplikator für vom Roboter autonom durchgeführte Wiederholungen vergrößert, um Entwicklungen stärker zu fördern, die die menschlichen Fernbediener bei ihren anspruchsvollen Aufgaben entlasten und Einsätze effektiver und sicherer machen können.

Neben der autonomen Erkundung in leicht- bis mittelschwerem Terrain konnte Team Hector dieses Jahr mithilfe eines neuen Algorithmus zur autonomen Ganzkörperregelung des an der TU Darmstadt entwickelten Rettungsroboters Asterix auch schwieriges Terrain mit hohen Stufen und Unebenheiten autonom überwinden. Ein weiterer Meilenstein waren die unter solch schwierigen Bedingungen erstmals in der Geschichte der Liga autonom erzielten Dexterity-Punkte für Inspektionsaufgaben in schwierigem Terrain.
Rang 2 in der Gesamtwertung
Nach den Vorrunden lag Team Hector auf Platz 5 und konnte sich damit zunächst einen Platz im Halbfinale der besten 9 Teams sichern. Nach einem spannenden und anspruchsvollen Finale der besten 5 Teams konnte sich Team Hector trotz erheblichen Zeitverlusts durch Reparaturbedarfe am Roboter während der Durchläufe von Platz 5 im Halbfinale sogar noch auf Platz 2 vorarbeiten.
Zusätzlich wurden mehrere Auszeichnungen zur Würdigung besonderer Leistungen gewonnen: Team Hector wurde mit dem Preis für Best in Class Autonomy, für die meisten im autonomen Betrieb erzielten Punkte, sowie für das beste Team Description Paper, das die Vorgehensweise und Methoden des Teams erläutert und damit den Wissensaustausch zwischen den Teams fördern soll, ausgezeichnet.
Auszeichnung für innovative Weiterentwicklung
Auch bei der neu eingeführten Technology Challenge zur Förderung innovativer Weiterentwicklungen war Team Hector erfolgreich und sicherte sich die Auszeichnung. Bei dieser Challenge war Funkkommunikation zwischen Operator und Roboter bei Durchführung relevanter Aufgaben systematisch gestört, um Technologien zu fördern, die dem Roboter einen zuverlässigen autonomen Betrieb unter Realbedingungen zu ermöglichen.
Team Hector ist ein interdisziplinäres Team aus wissenschaftlichen Mitarbeitenden und Studierenden der Studiengänge Informatik, Autonome Systeme und Robotik, Computational Engineering, Maschinenbau und Mechatronik der TU Darmstadt am Fachgebiet Simulation, Systemoptimierung und Robotik am Fachbereich Informatik.
Team Hector
Recommended external content
We have selected external content from Instagram for you and would like to show it to you right here. To do this, you must reveal it with one click. You can hide the external content at any time with another click.
I agree to external content from X being shown to me. This may result in personal data being transmitted to third-party platforms. You can find more information in our Privacy Policy.
Team Hector ist aus den Darmstadt Dribblers, dem ehemaligen Weltmeister-Roboterfußball-Team, hervorgegangen und wurde 2009 im Rahmen des Promotionskollegs GRK 1362 als interdisziplinäres Projekt von Forschenden aus den Fachbereichen Informatik und Maschinenbau der TU Darmstadt gegründet.
Durch die Erforschung und Entwicklung intelligenter Such- und Rettungsroboter unterstützt das Team menschliche Ersthelfer in Katastrophenfällen. Geleitet wird die Gruppe von Informatikprofessor Oskar von Stryk am Fachgebiet Simulation, Systemoptimierung und Robotik (SIM).
Die Teammitglieder sind Doktorand*innen der TU Darmstadt sowie Studierende der Bachelor- und Masterstudiengänge Autonome Systeme , Informatik , Computational Engineering, Informationssystemtechnik, Maschinenbau, Mechatronik und Elektrotechnik.
Über den RoboCup
Die internationale RoboCup-Community hat das Ziel, die Entwicklung intelligenter Roboter durch Wettbewerbe zu fördern, die Forschenden und Studierenden aus aller Welt als attraktives Testfeld zur Demonstration ihrer Roboter dienen.
Vor dem Hintergrund des Kobe-Erdbebens 1995 in Japan wurde beim RoboCup 2001 der erste Wettbewerb in der Rescue Robot League ausgetragen. Die Liga befasst sich mit der Grundlagenforschung auf dem Gebiet der Rettungsrobotik. Im Rahmen der Rescue Robot League besteht auch eine enge Zusammenarbeit mit dem US-amerikanischen National Institute of Standards and Technology (NIST) bei standardisierten Umgebungen und Benchmark-Tests zur Untersuchung und Entwicklung von Rettungsrobotertechnologien.


