
Robot Gallery
Some of Our Robots and Robotics Systems



Retired Robots






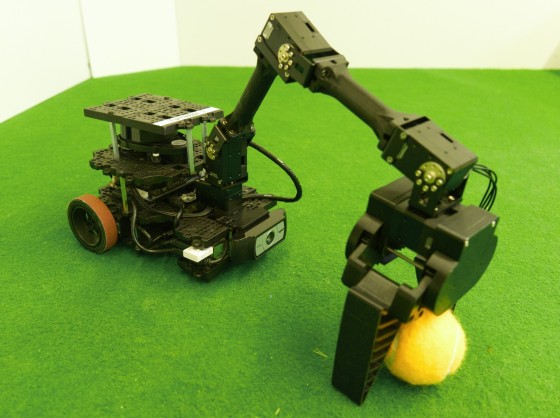
Autonomous Marine Vehicle

A small sized autonomous marine vehicle is being developed. It will be used among others for research in the PhD program Cooperative, Adaptive and Responsive Monitoring in Mixed-Mode Environments.
The New Four-Legged Robot
We have developed a as a versatile, open and modular platform for research and education in autonomous robots.

Four-Legged Robots

Our RoboCup team, the Darmstadt Dribbling Dackels (DDD), participates in the Sony Four-Legged Robot League and won the GermanOpen in 2002, 2003 and 2007 and the World Championship with the GermanTeam in 2004, 2005 and 2008.
Humanoid Robot “Lara”
The 130cm tall “Lara” is the first humanoid robot on two legs being actuated not by electrical motors but by 34 newly developed artificial muscles. Furthermore, Lara exibits a design which at the same time is futuristic and feminine. More details will be provided at www.lara-robot.de.

Pioneer 2-DX

The wheeled Pioneer robot provides a testbed for research in autonomous navigation and exploration based on multiple sensor fusion.
Daisy
“Daisy”, the 80cm high humanoid robot prototype, provides a testbed for research in autonomous biped robots. It is a joint research project with the former Control Systems Group at Technische Universität Berlin, where it has been assembled.

Lego Mindstorm

Several Lego Mindstorm Robotics Invention kits have been used in the Basic Practical Course in Robotics.
Contact
Sekretariat SIM
sek@sim.tu-...
work +49 6151-16-25563
Work
S2|02 213
Hochschulstr. 10
64289
Darmstadt
Opening hours :
Mo : 01.00 p.m. - 03.30 p.m.
Tu : 09.00 a.m. - 12.30 p.m.
We: 08.00 - 11.30 a.m.
Th : 09.00 a.m. - 12.30 p.m.
Fr : 10.00 a.m - 11.30 p.m.